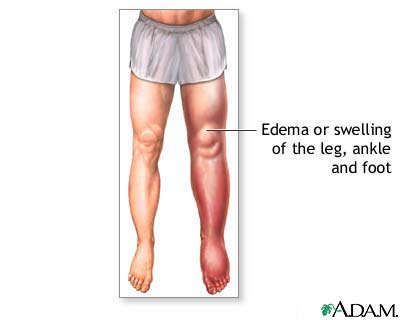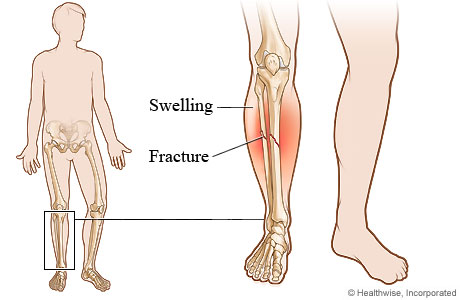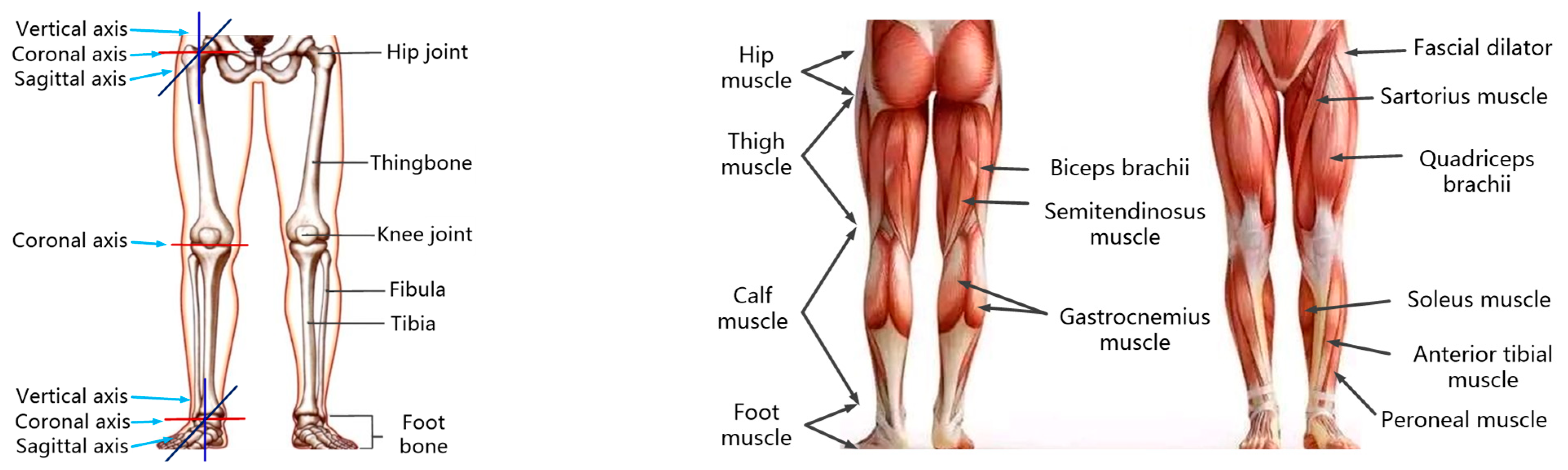
In recent years, the lower limb exoskeleton has been more and more widely used in military, medical and other fields. In this paper, the muscle–bone model of the lower limb during the human walking process is analyzed, and a lower limb exoskeleton with the purpose of loadbearing is designed. The exoskeleton is driven by four hydraulic cylinders to the hip and knee joints whose design load is 50 kg. The kinematic and dynamic model of the exoskeleton designed in this paper is established and analyzed, and it is simulated. Finally, the experiments were carried out on the exoskeleton test platform to verify that the stability, bearing capacity, tracking effect and durability of the exoskeleton can meet the requirements.

Actuator-based DiM DYNAMIC simulator, simulators
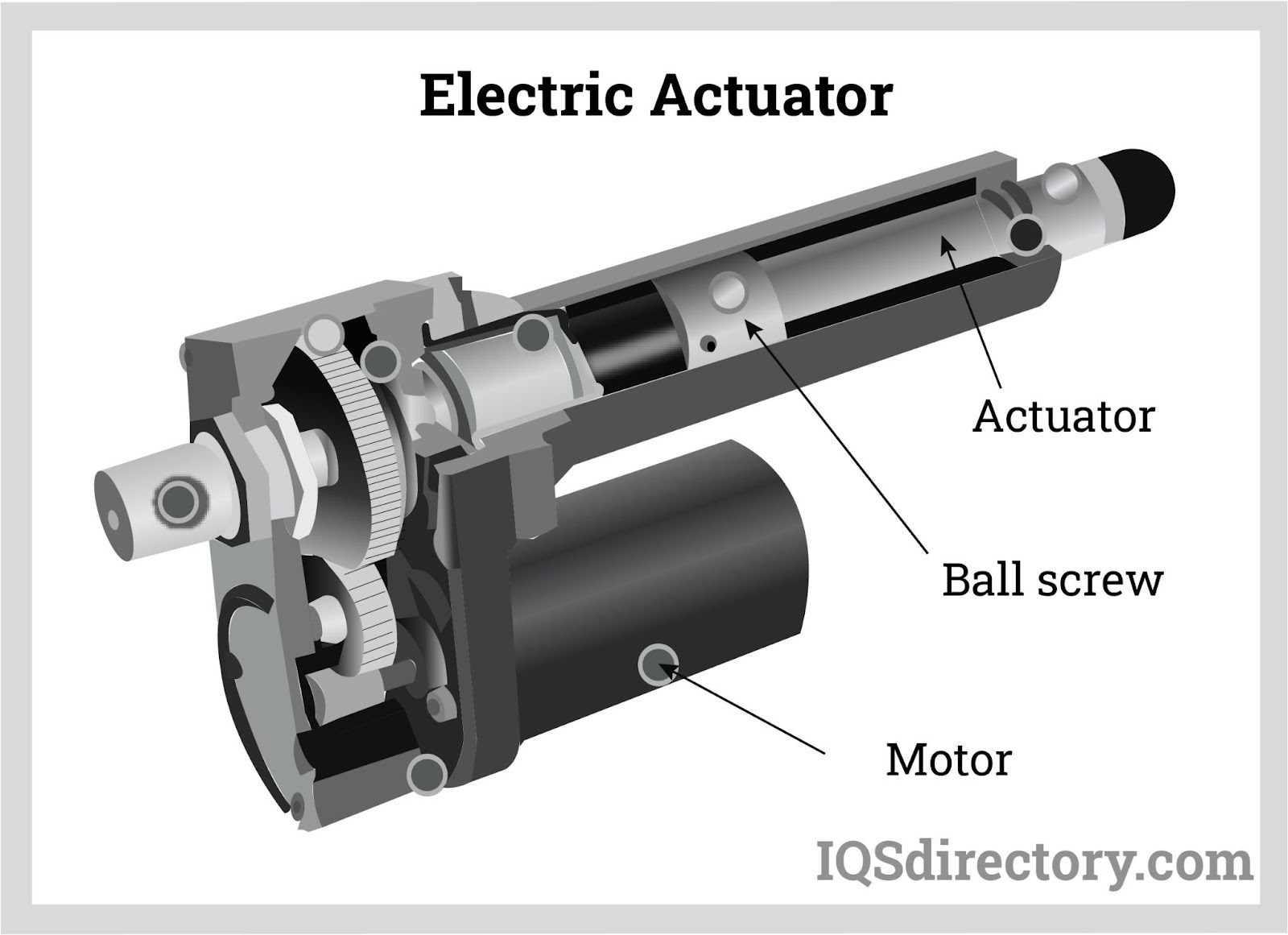
Electric Actuators: Types, Applications, Benefits, and Design
Actuators, Free Full-Text, stepper motor
Actuators, Free Full-Text

Actuators, Free Full-Text
Actuators, Free Full-Text

KSB Asia South & Pacific on LinkedIn: An article about the new pneumatic quarter-turn actuators was published in…
Control Valve Actuators and Positioners
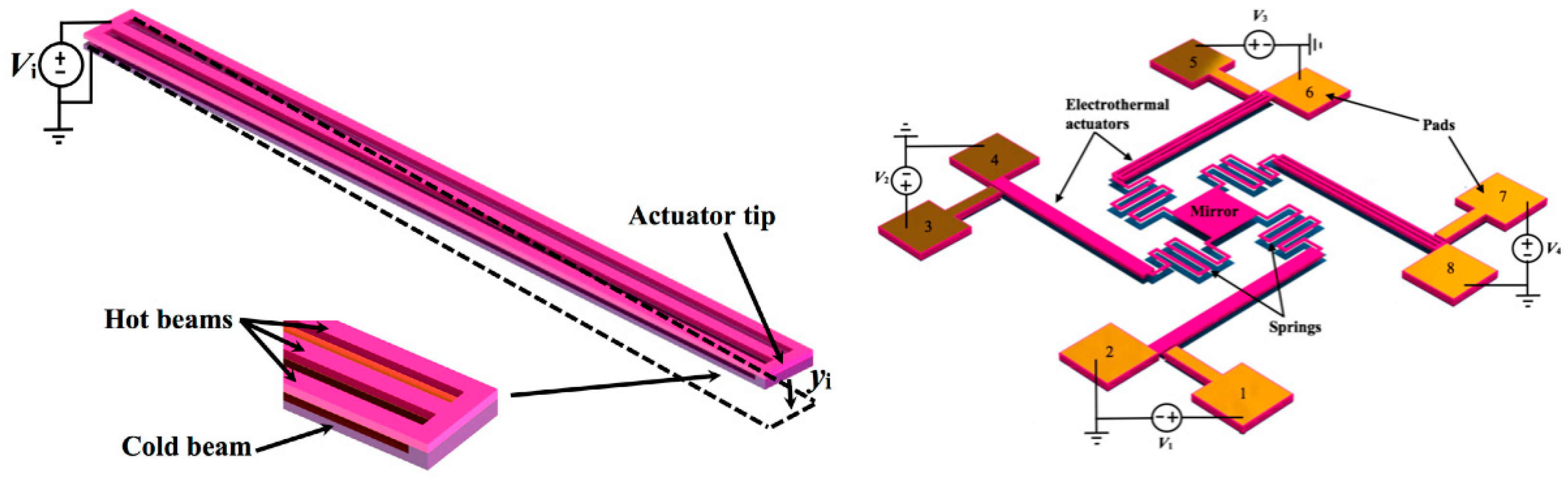
Actuators, Free Full-Text

Actuators, Free Full-Text, stepper motor

Actuators, Free Full-Text, stepper motor
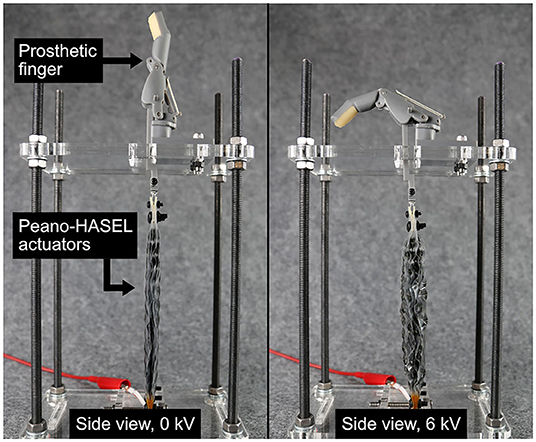
Frontiers Design of a High-Speed Prosthetic Finger Driven by Peano-HASEL Actuators
PDF) Three-Axis Inductive Displacement Sensor Using Phase

Actuators Type A - SOMAS - PDF Catalogs, Technical Documentation

Biology and bioinspiration of soft robotics: Actuation, sensing, and system integration - ScienceDirect