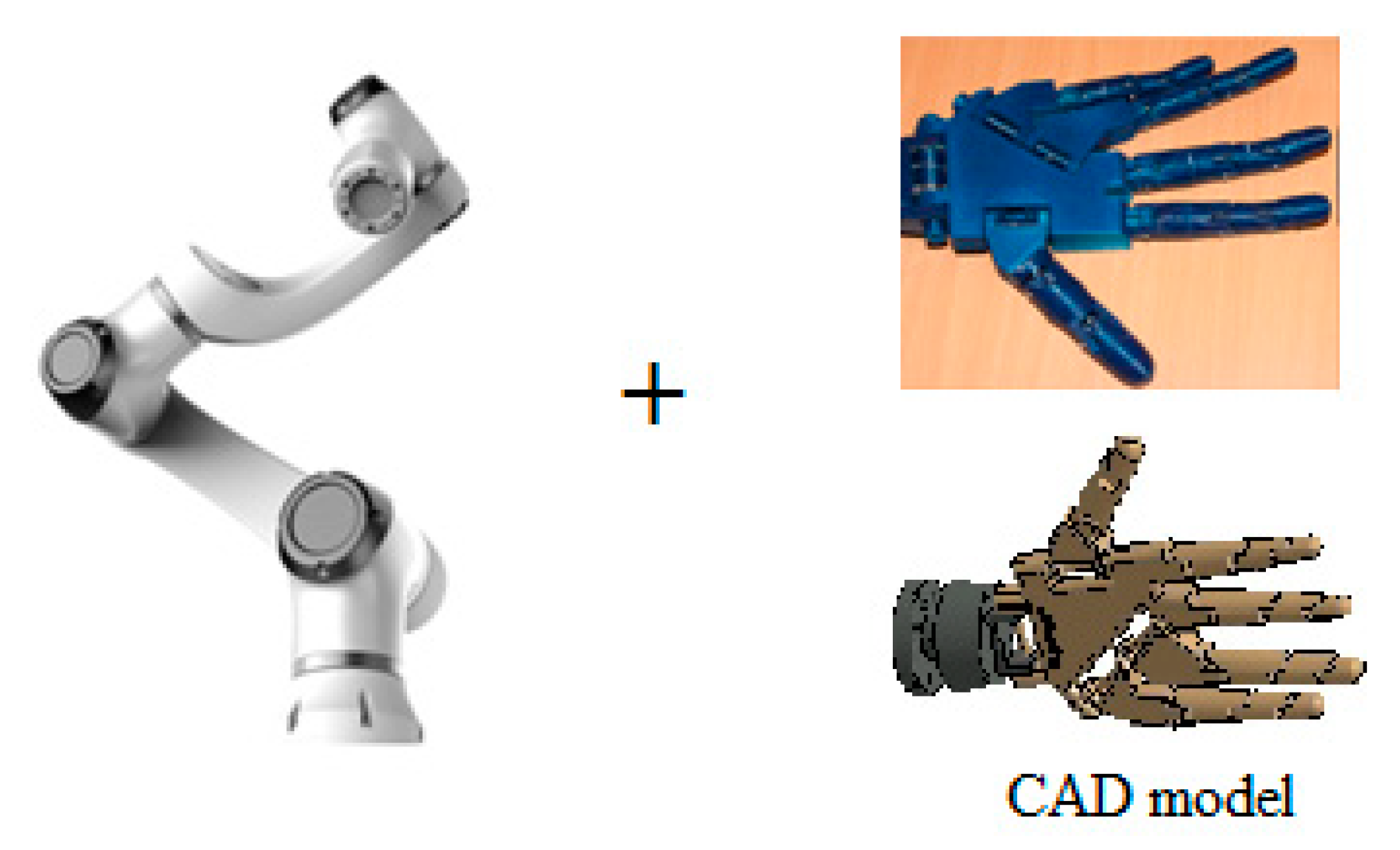
Design and demonstration of human climbing grippers. (a) The CAD model
Proceedings, Free Full-Text

A schematic view of the flexible DSSC. b Photocurrent

Three finger gripper CAD assembly model (a) and its 3D-printed

The CAD model for gripping module.
PDF) Robust scalable reversible strong adhesion by gecko-inspired composite design

A SEM image and b XRD pattern of vertically aligned ZnO nanowire array
/files/Articles/562524/frobt-08

Fabrication, microstructural inspiration, and characterization of the

The CAD model for gripping module. (a) Top view; (b) Side view; (c)

Ferromagnetic Pipe Climbing Robot - Arnab Kumar Das

Hongyu LU, Beihang University (BUAA), Beijing, BUAA, Department of Inertia Technology and Navigation Guidance Instrument

Tree Climbing Robot : 20 Steps (with Pictures) - Instructables

Pipe climbing Robot, 3D CAD Model Library
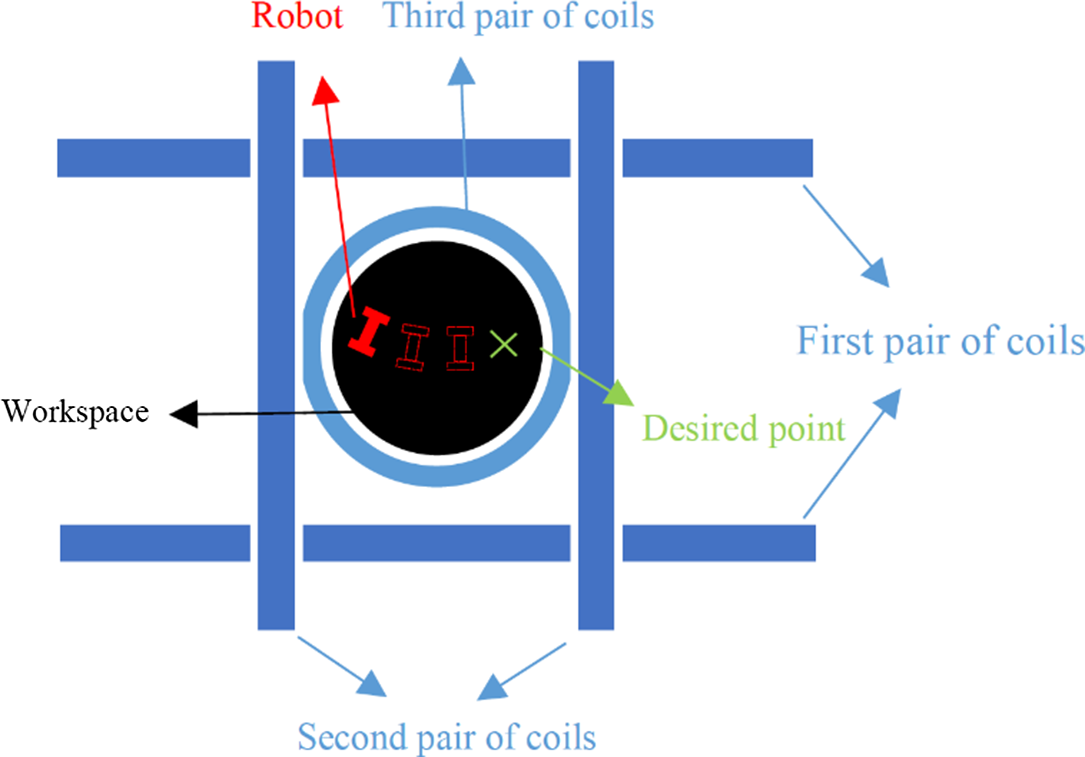
Position control of a wheel-based miniature magnetic robot using neuro-fuzzy network, Robotica

Li LVZHOU, Tsinghua University, Beijing, TH, Department of Mechanical Engineering







