Development of Active Lower Limb Robotic-Based Orthosis and

Pediatric Orthotics and Prosthetic Services

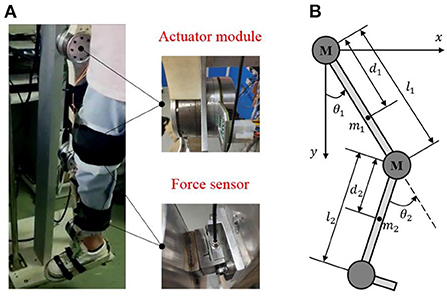
Dynamic analysis and control of a hybrid lower limb rehabilitation robot to reduce human-robot interaction forces - Babak Imani, Farid Najafi, 2023

Retracted] Robust LQR-Based Neural-Fuzzy Tracking Control for a Lower Limb Exoskeleton System with Parametric Uncertainties and External Disturbances
Robotics, Free Full-Text

A Numerical Method for Determining the Workspace of a Passive Orthosis Based on the RRRR Mechanism in the Lower Limb Rehabilitation System

RMI Projects

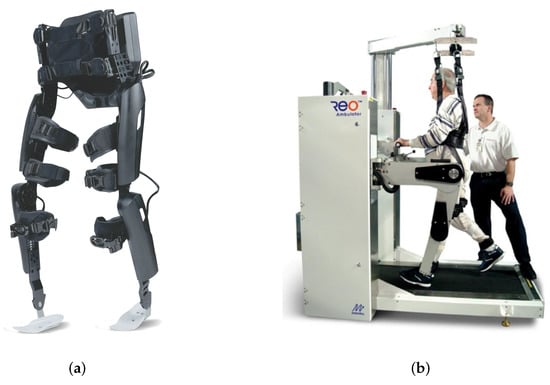
PDF) Review and Analysis of Platform-Related Performance of Rehabilitation Lower Limb Exoskeletons
Frontiers A triple-step controller with linear active disturbance rejection control for a lower limb rehabilitation robot

Actuators, Free Full-Text
Applied Sciences, Free Full-Text
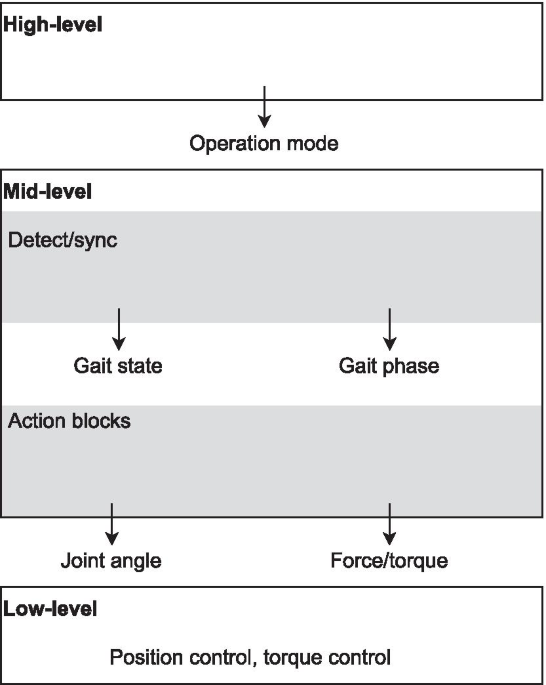
Review of control strategies for lower-limb exoskeletons to assist gait, Journal of NeuroEngineering and Rehabilitation

Lower Extremity Exoskeleton Device for Motion Assistance and GaitRehabilitation: Design Considerations
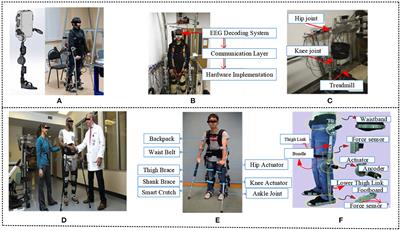
Frontiers Lower limb exoskeleton robot and its cooperative control: A review, trends, and challenges for future research