Energies, Free Full-Text
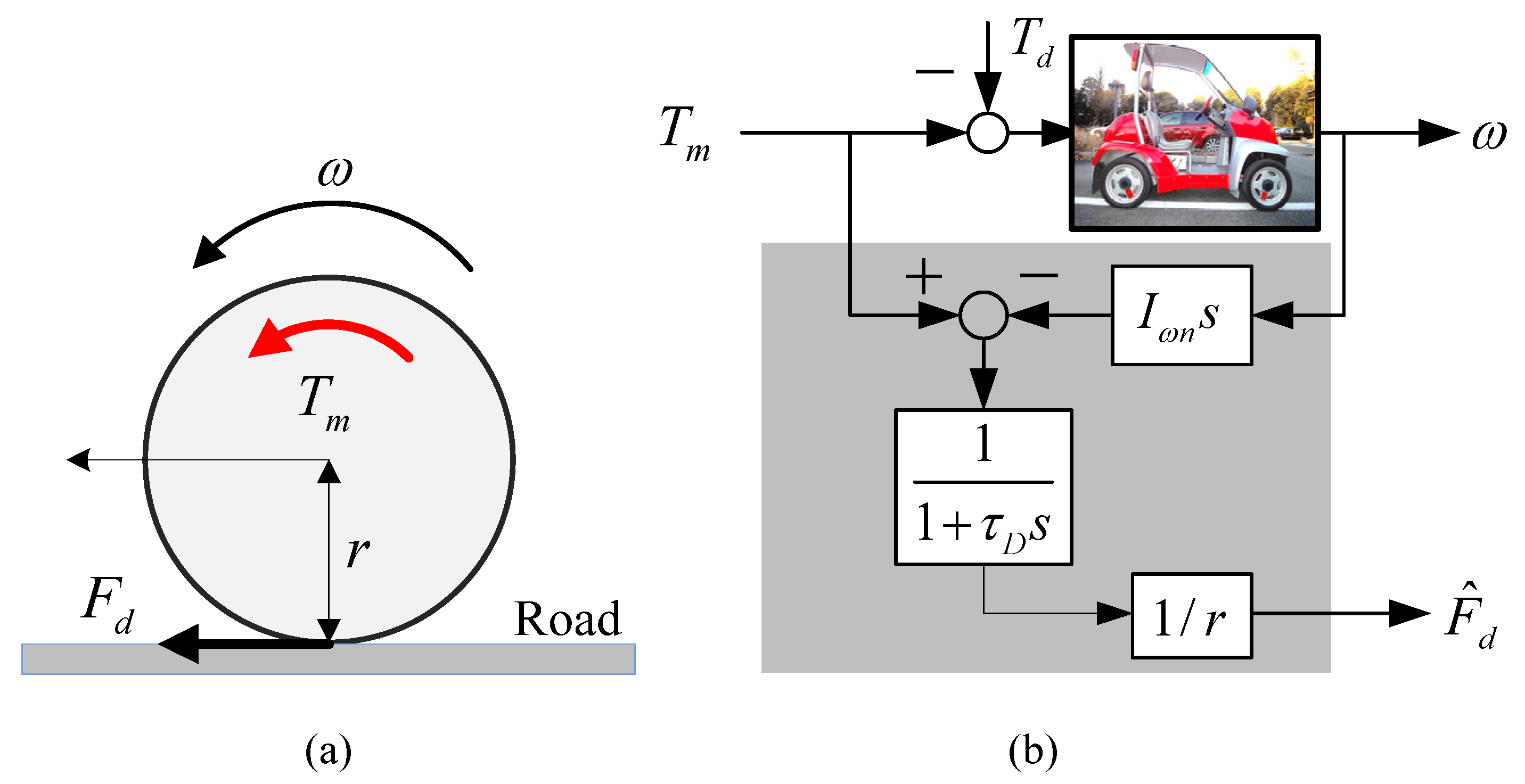
In this paper, a robust wheel slip control system based on a sliding mode controller is proposed for improving traction-ability and reducing energy consumption during sudden acceleration for a personal electric vehicle. Sliding mode control techniques have been employed widely in the development of a robust wheel slip controller of conventional internal combustion engine vehicles due to their application effectiveness in nonlinear systems and robustness against model uncertainties and disturbances. A practical slip control system which takes advantage of the features of electric motors is proposed and an algorithm for vehicle velocity estimation is also introduced. The vehicle velocity estimator was designed based on rotational wheel dynamics, measurable motor torque, and wheel velocity as well as rule-based logic. The simulations and experiments were carried out using both CarSim software and an experimental electric vehicle equipped with in-wheel-motors. Through field tests, traction performance and effectiveness in terms of energy saving were all verified. Comparative experiments with variations of control variables proved the effectiveness and practicality of the proposed control design.
as2.ftcdn.net/v2/jpg/03/03/07/89/1000_F_303078975_

Energies, Free Full-Text, alpha zero campinas

LLPS of Tau and modeling of its phase separation free energy landscape.
Bionow Are Free Energy Perturbation (FEP) methods suitable for your project?
Energies, Free Full-Text, pengguna kilo kilo no mi

Energy Flows (Free PDF Download) – The NEED Project

Infographic: 5 Advantages of the Total Home Energy System
24/7 Carbon-Free Energy: Methods, Impact & Benefits

Energies Free Full-Text An Improved Model Equation Based On, 48% OFF

Results of the free energy calculation by MM-PBSA and NMODE