Frontiers Gait Optimization Method for Humanoid Robots Based on

Frontiers Gait Optimization Method for Humanoid Robots Based on

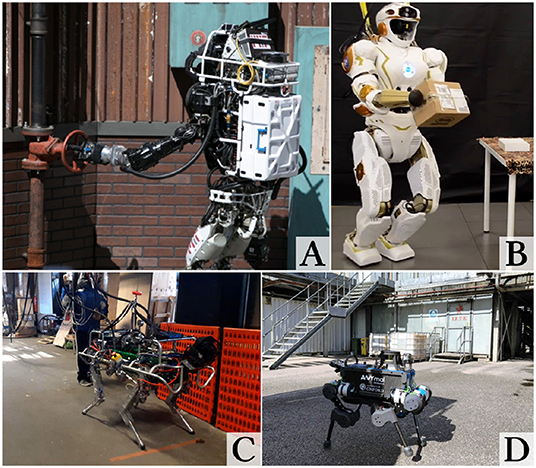
a) The humanoid robot hrp -2 [18]. (b) Example of varied terrain

Advancements in Humanoid Robots: A Comprehensive Review and Future
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Curriculum-based humanoid robot identification using
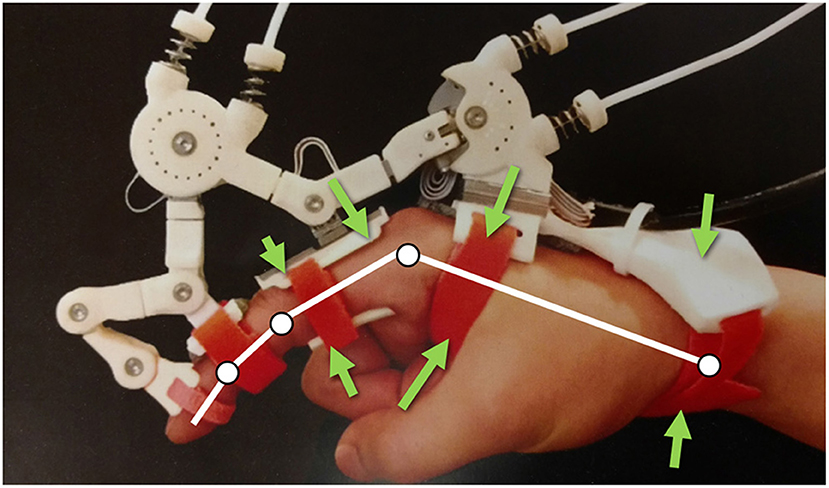
Frontiers Designing Physical Human-Robot Interaction Interfaces

DLR humanoid robot Justin. Download Scientific Diagram
Frontiers Gait Optimization Method for Humanoid Robots Based on

Advancements in Humanoid Robots: A Comprehensive Review and Future

Smart Gait: A Gait Optimization Framework for Hexapod Robots
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Pronto: A Multi-Sensor State Estimator for Legged

PDF] Tello Leg: The Study of Design Principles and Metrics for
Frontiers An Optimization-Based Locomotion Controller for