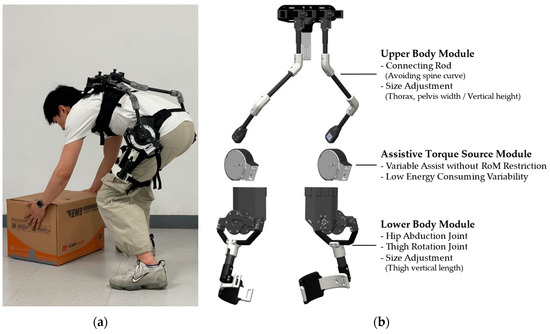
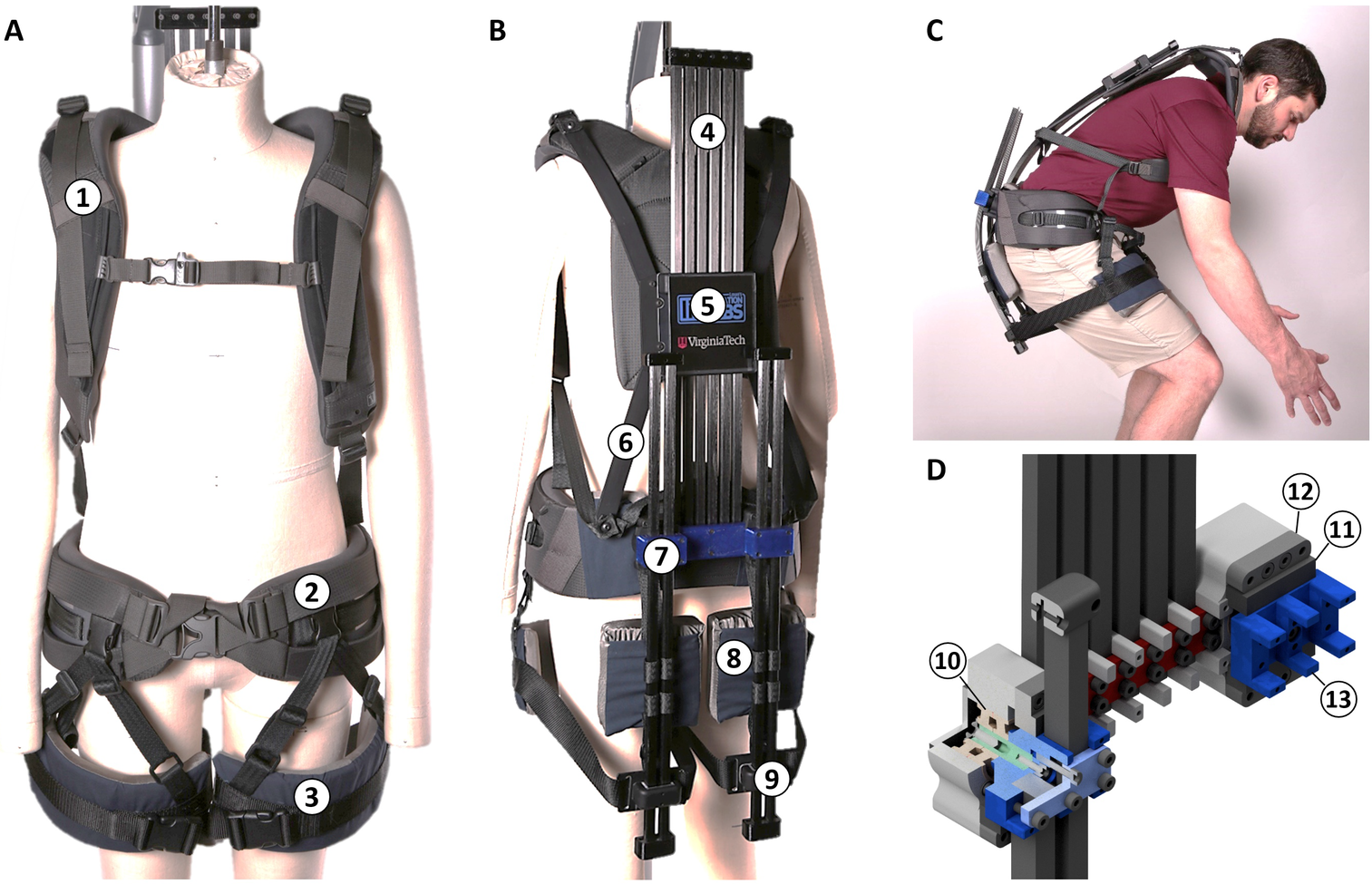
Passive back support exoskeleton: In the elastic spinal module, two
Description

IJERPH, Free Full-Text

Passive spinal exoskeleton with the elastic spinal module (a), the

Back support devices classified based on actuation technology and

IJERPH, Free Full-Text

Example of control output for the support of the quasi-passive
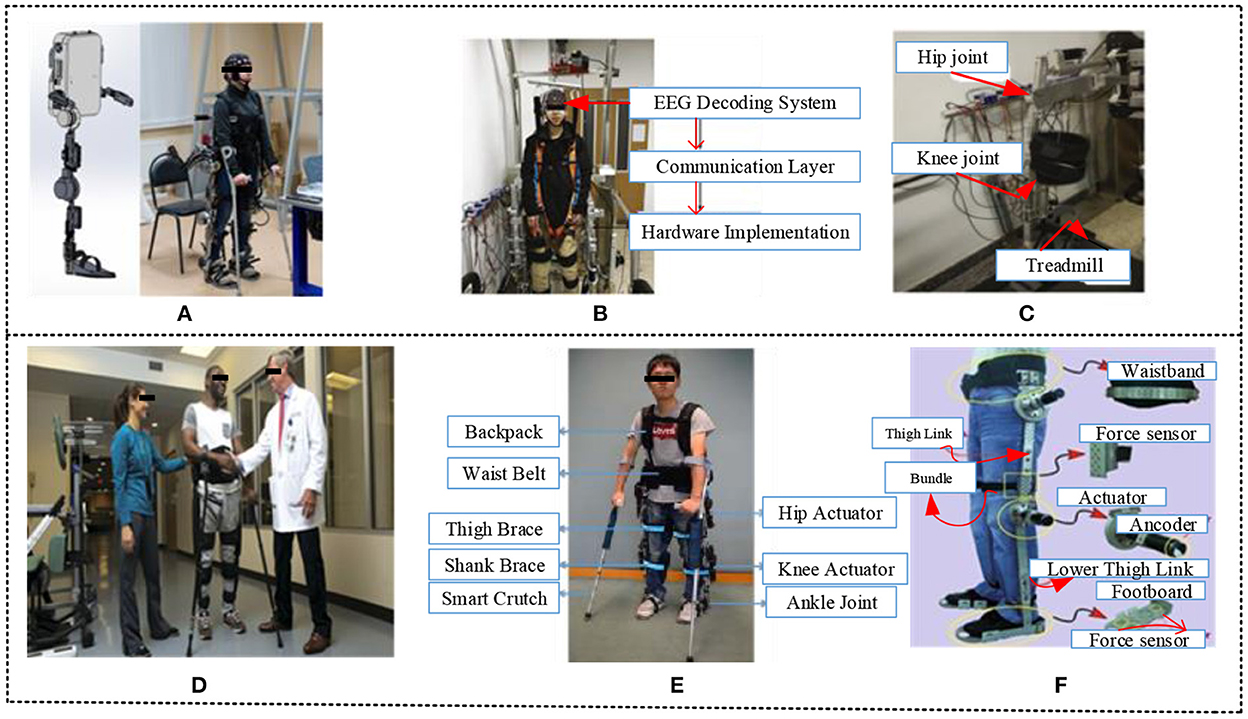
Frontiers Lower limb exoskeleton robot and its cooperative

Carlos RODRIGUEZ-GUERRERO, Professor, Professor

SPEXOR: Design and development of passive spinal exoskeletal robot
Carlos RODRIGUEZ-GUERRERO, Professor, Professor
Biomimetics, Free Full-Text
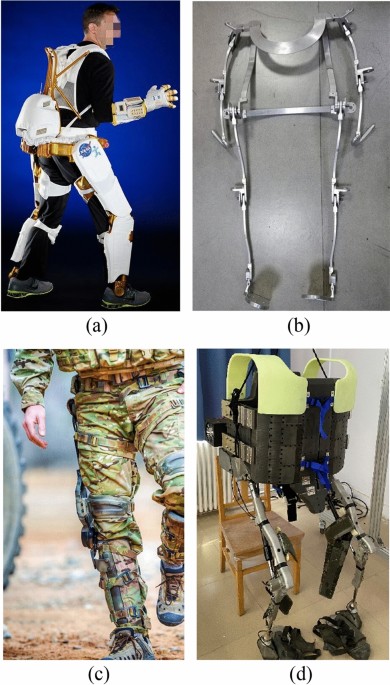
Systematic Review on Wearable Lower Extremity Robotic Exoskeletons

PDF) Misalignment compensation as a way to ensure full human

Marco ROSSINI, PhD Student
Design and preliminary evaluation of a flexible exoskeleton to
Related products

Tapered Pants Ladies Long Length Pockets High Waist Back Elastic Front – coca公式ストア

Skin Elasticity: What It Is and 13 Science-Backed Ways to Improve It

Close up view of the back with striae distensae (striae rubrae) on the skin. The concept of impaired skin elasticity during puberty Stock Photo

Snap-Back and Gone-Forever Goods: Understanding the COVID
You may also like

NEW Women Lululemon Hotty Hot Low-Rise Lined Short 2.5 Lemon Vibe

One 1 OZ Shot Glass Shell CasingCrazy Russian - Made of Real World War 2 era Russian Anti Tank Shell casing : : Home

Tom Knox Graphic Hoodie - Dickies US

Buy online Tie-up Laced Bra And Panty Set from lingerie for Women by Melisa for ₹798 at 0% off
$ 21.99USD
Score 4.5(762)
In stock
Continue to book
You may also like
NEW Women Lululemon Hotty Hot Low-Rise Lined Short 2.5 Lemon Vibe
One 1 OZ Shot Glass Shell CasingCrazy Russian - Made of Real World War 2 era Russian Anti Tank Shell casing : : Home
Tom Knox Graphic Hoodie - Dickies US
Buy online Tie-up Laced Bra And Panty Set from lingerie for Women by Melisa for ₹798 at 0% off
$ 21.99USD
Score 4.5(762)
In stock
Continue to book
©2018-2024, paramtechnoedge.com, Inc. or its affiliates