The final design constrains gripper travel using a pair of bearing

Download scientific diagram | The final design constrains gripper travel using a pair of bearing shafts. from publication: Axiomatic Design of a Linear Motion Robotic Claw with Interchangeable Grippers | Reykjavik University's electronic lab has a five-axis CRS Robotics A255 arm used in laboratory exercises that are in need of an improved claw. The current claw limits the robot arm operation duration and dexterity due to its bulk. In addition, the grippers don’t provide a | Axiomatic Design, Robotics and Physical Exercise | ResearchGate, the professional network for scientists.

Active debris removal: A review and case study on LEOPARD Phase 0-A mission - ScienceDirect

The final design constrains gripper travel using a pair of bearing
FUNdaMENTALS of Design - PERG - MIT
image010.jpg
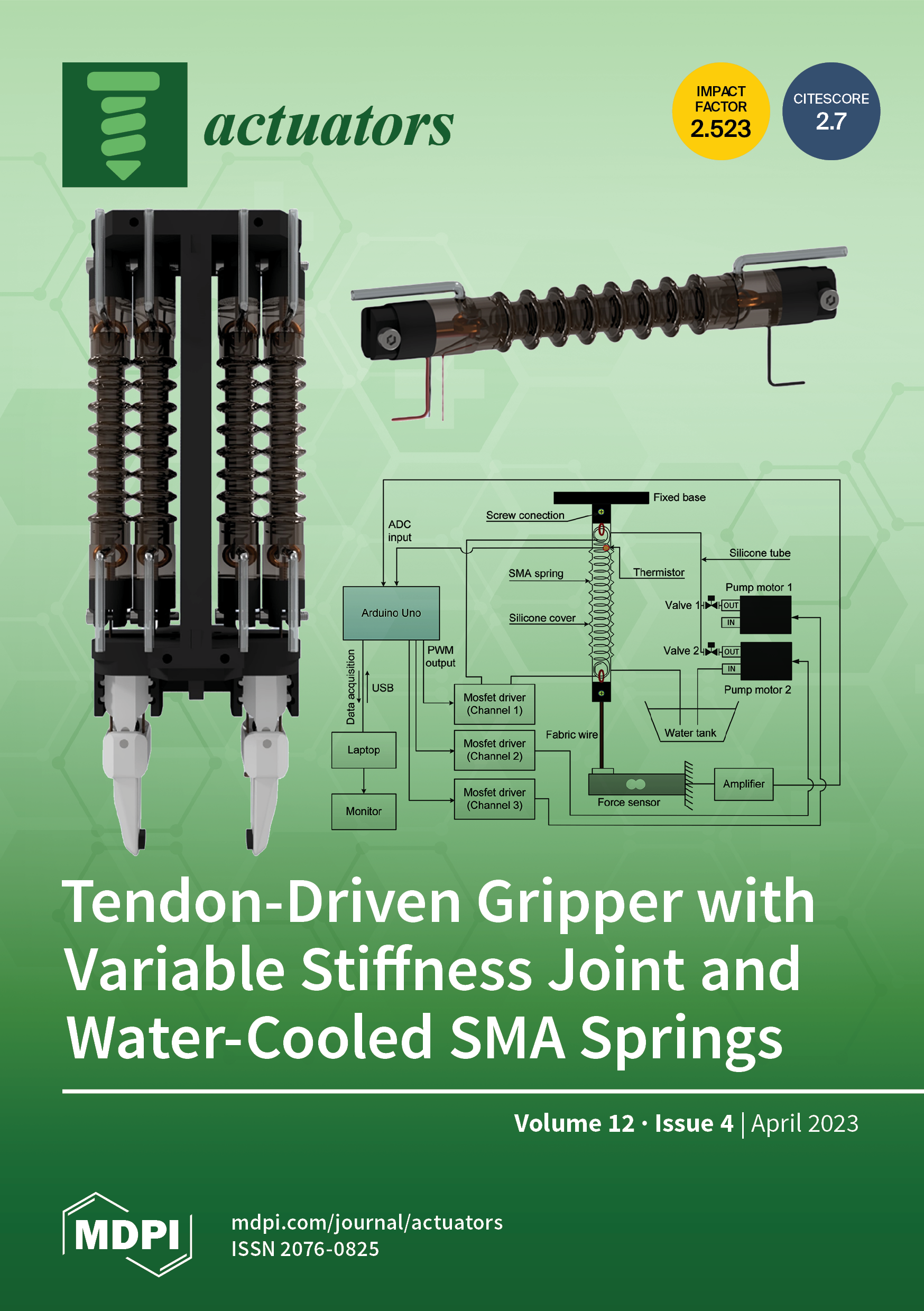
Actuators April 2023 - Browse Articles

Cosmoclench Gripper, PDF, Screw
Manual Viewer - Section - FRC Q&A
Robotics, Free Full-Text

Reactivity and statefulness: Action-based sensors, plans, and necessary state - Grace McFassel, Dylan A Shell, 2023

Multi-environment robotic transitions through adaptive morphogenesis







