The powered simple walking model. (a) A hip spring is attached

The Walking Dead: The Road to Woodbury

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

The Clumsy Quest to Perfect the Walking Robot

Gait Based on the Spring-Loaded Inverted Pendulum

The reference limit cycle (red) and the actual solution (blue) for all

190194 PDFs Review articles in GAIT

118372 PDFs Review articles in WALKING
Machines, Free Full-Text

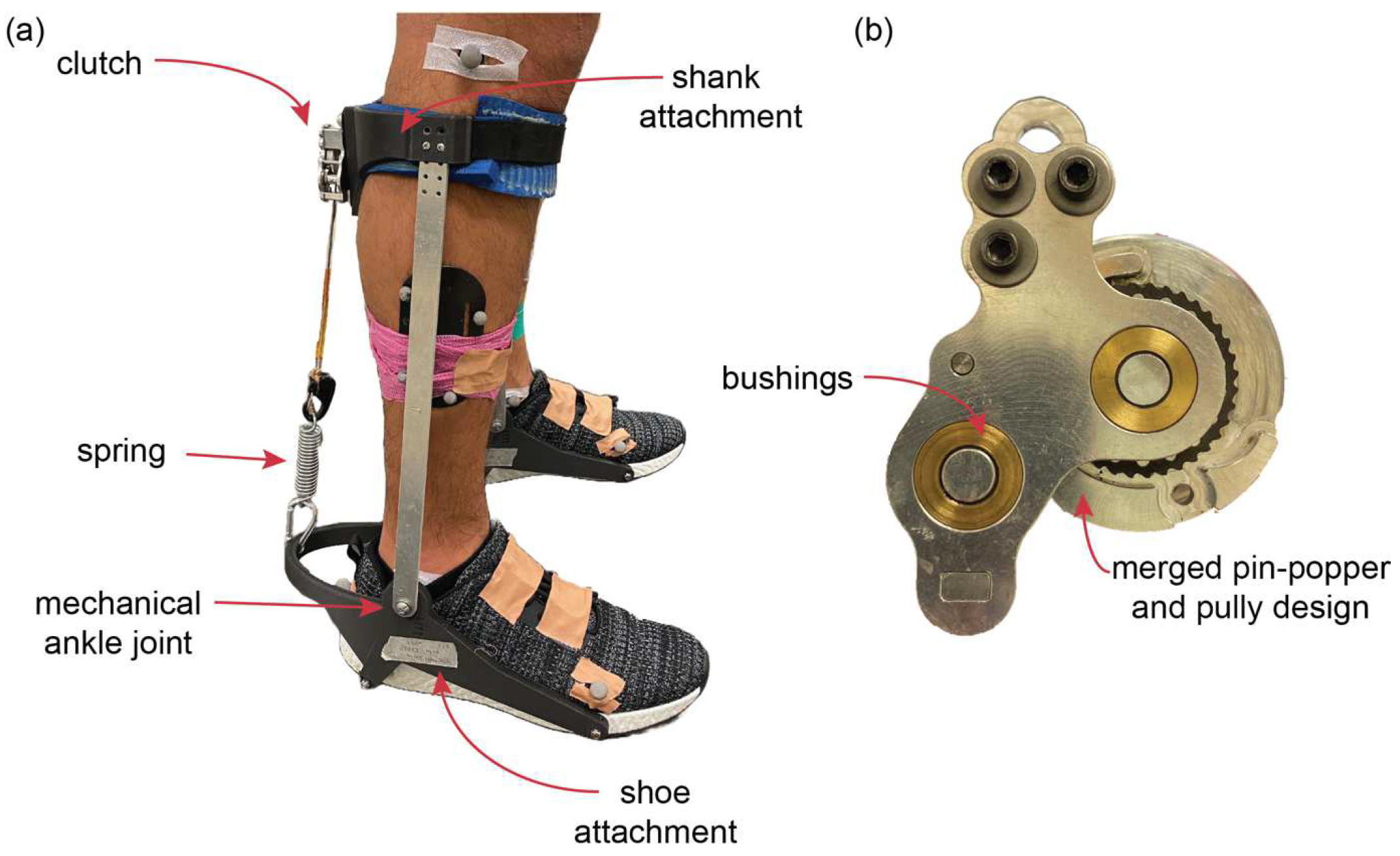
Picture and illustration of the spring-based, passive actuator on the

Shinya Aoi's research works Osaka University, Osaka (Handai) and other places

SLR speeds for walking and running for both experiments. Data points

Margins of stability as a function of walking speed between 1.0 and

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
:max_bytes(150000):strip_icc()/042122-mindy-kaling-trends-lead-d97c387e3e244ee19562283106bf9c6c.jpg)






